本文主要介绍TransTrack, TrackFormer, MORT三种算法,但考虑到三篇文章中都与 DETR 高度相关,这里对DETR也做一个简单的介绍。
DETR#
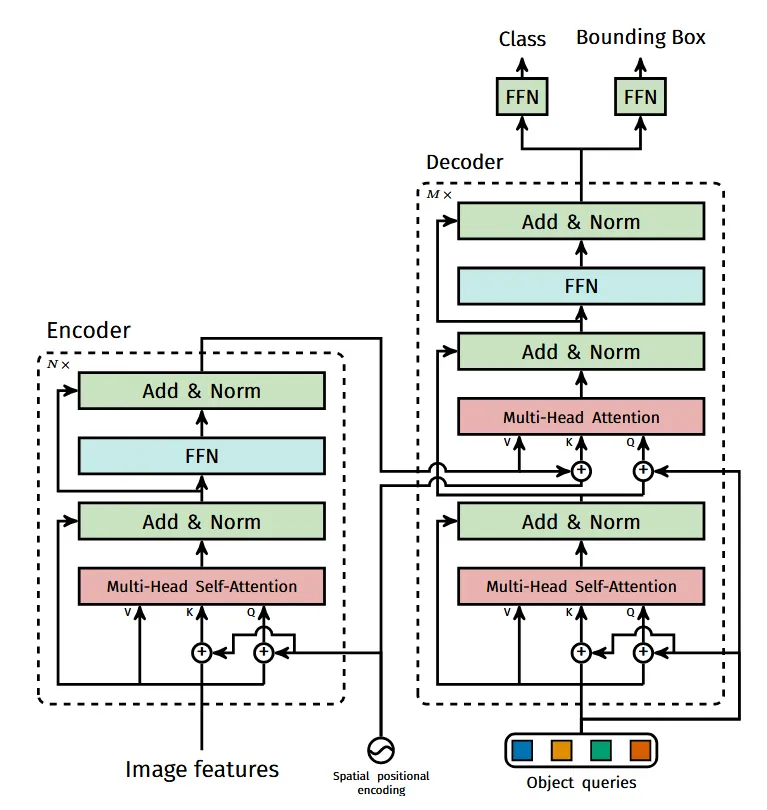
DETR 通过解码器得到固定 N 个预测集(N设置的远大于实际图像中的目标数量)
网络结构#
import torch
from torch import nn
from torchvision.models import resnet50
class DETR(nn.Module):
def __init__(self, num_classes, hidden_dim, nheads,
num_encoder_layers, num_decoder_layers):
super().__init__()
# We take only convolutional layers from ResNet-50 model
self.backbone = nn.Sequential(*list(resnet50(pretrained=True).children())[:-2])
self.conv = nn.Conv2d(2048, hidden_dim, 1)
self.transformer = nn.Transformer(hidden_dim, nheads,
num_encoder_layers, num_decoder_layers)
self.linear_class = nn.Linear(hidden_dim, num_classes + 1)
self.linear_bbox = nn.Linear(hidden_dim, 4)
self.query_pos = nn.Parameter(torch.rand(100, hidden_dim))
self.row_embed = nn.Parameter(torch.rand(50, hidden_dim // 2))
self.col_embed = nn.Parameter(torch.rand(50, hidden_dim // 2))
def forward(self, inputs):
x = self.backbone(inputs)
h = self.conv(x)
H, W = h.shape[-2:]
pos = torch.cat([
self.col_embed[:W].unsqueeze(0).repeat(H, 1, 1),
self.row_embed[:H].unsqueeze(1).repeat(1, W, 1),
], dim=-1).flatten(0, 1).unsqueeze(1)
h = self.transformer(pos + h.flatten(2).permute(2, 0, 1),
self.query_pos.unsqueeze(1))
return self.linear_class(h), self.linear_bbox(h).sigmoid()
detr = DETR(num_classes=91, hidden_dim=256, nheads=8, num_encoder_layers=6, num_decoder_layers=6)
detr.eval()
inputs = torch.randn(1, 3, 800, 1200)
logits, bboxes = detr(inputs)- 通过一个 CNN 网络提取图像特征,并将特征图展平后加入位置编码,输入到 Transformer 编码器中得到 全局特征 信息;
- 将一组可学习的对象查询作为 Query,与编码器输出的特征(作为 Key 和 Value)一起输入到 Transformer 解码器,得到隐藏状态;
- 将解码器输出的隐藏状态分别送入两个 FFN ,直接并行预测出最终的检测结果(类别和边界框坐标)。
实现细节#
目标查询:与传统方法中的锚框作用类似,但是这是一个可学习的参数,用于查询特定位置的目标框。 全连接层:编码器中的全连接层实际上由两层 的卷积层组成。
TransTrack#
注意力机制在MOT的应用#
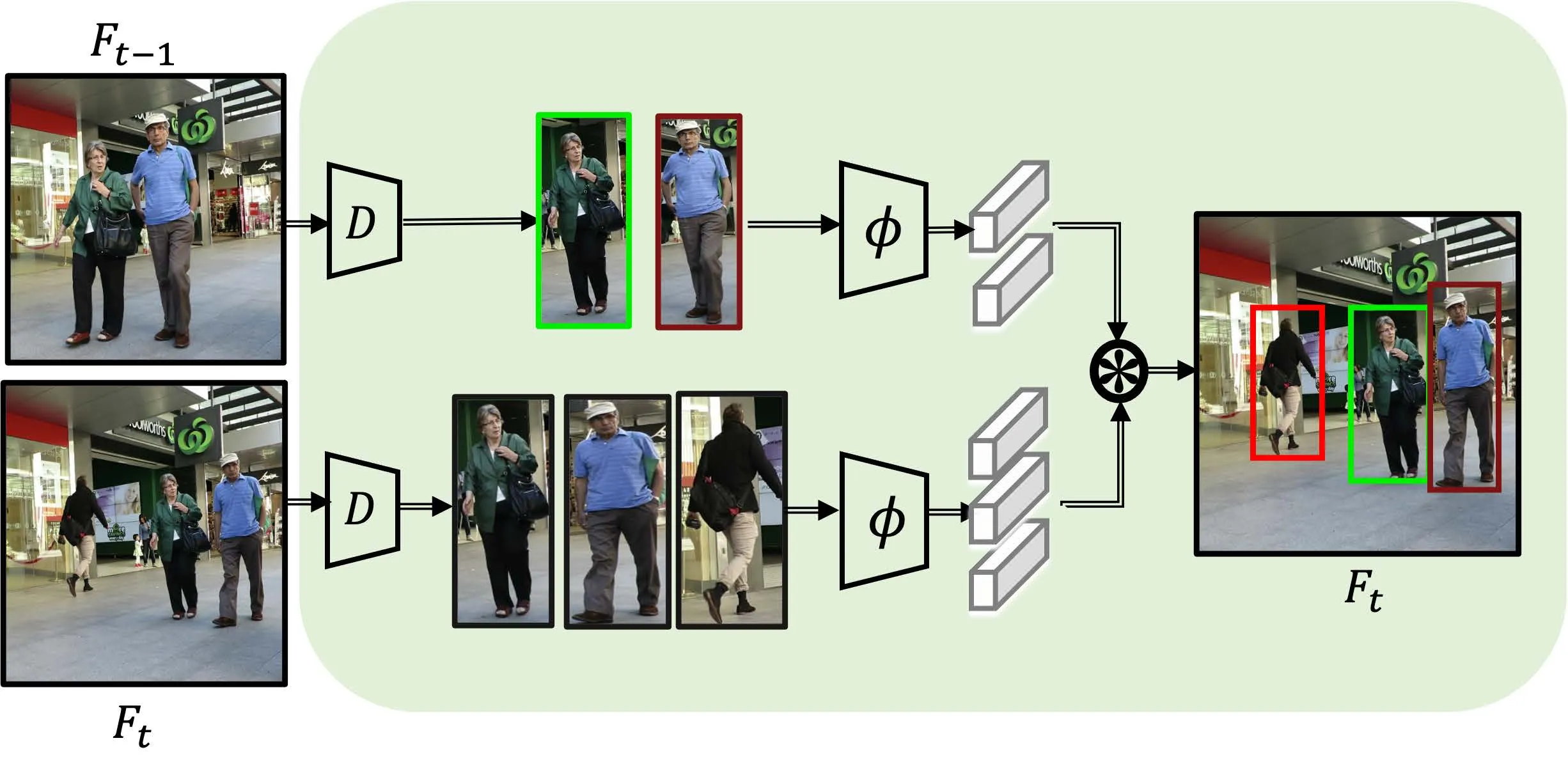
下面分别是基于检测的多目标跟踪、基于注意力机制的单目标跟踪、基于注意力机制的多目标跟踪流程。
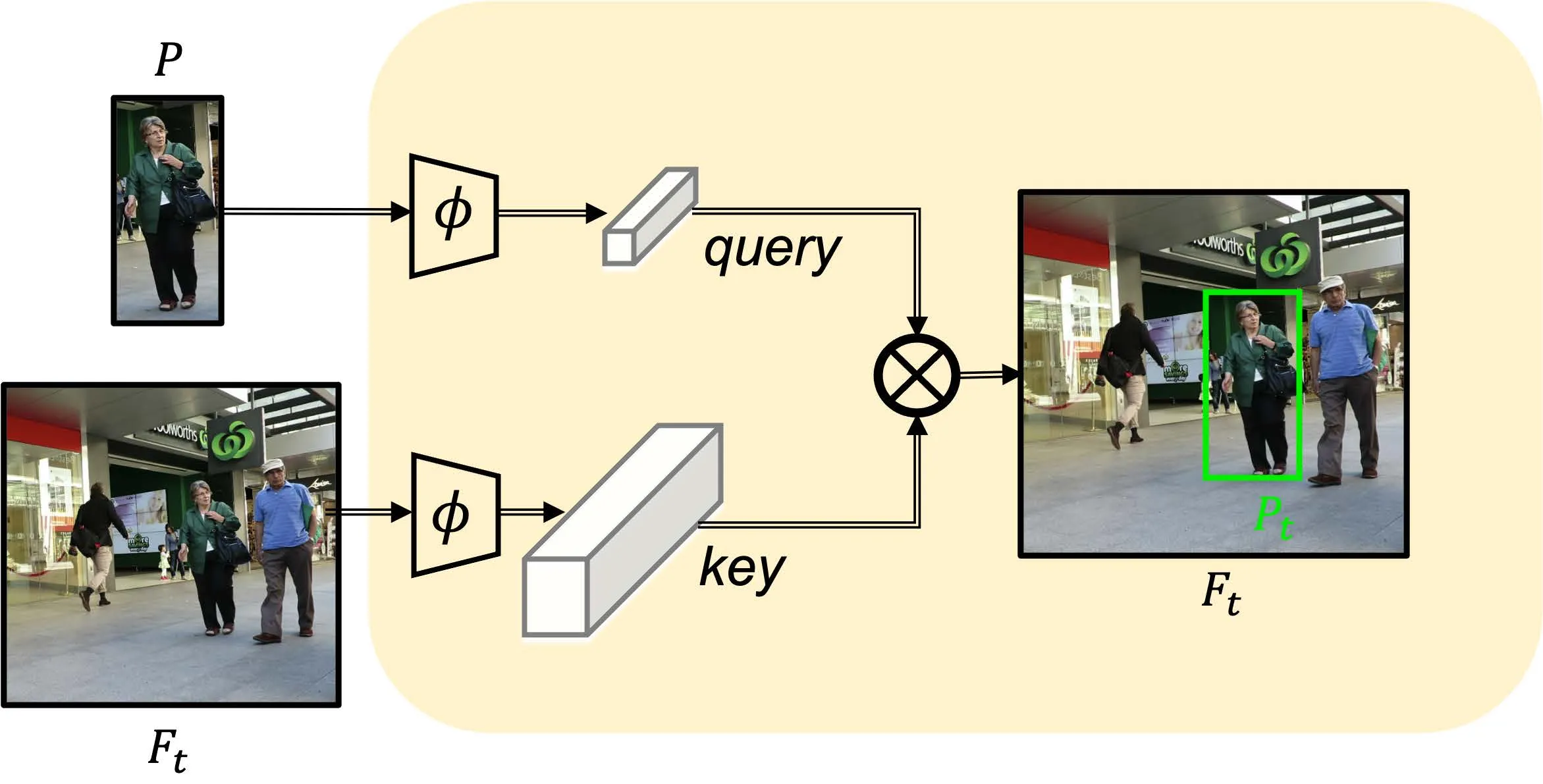
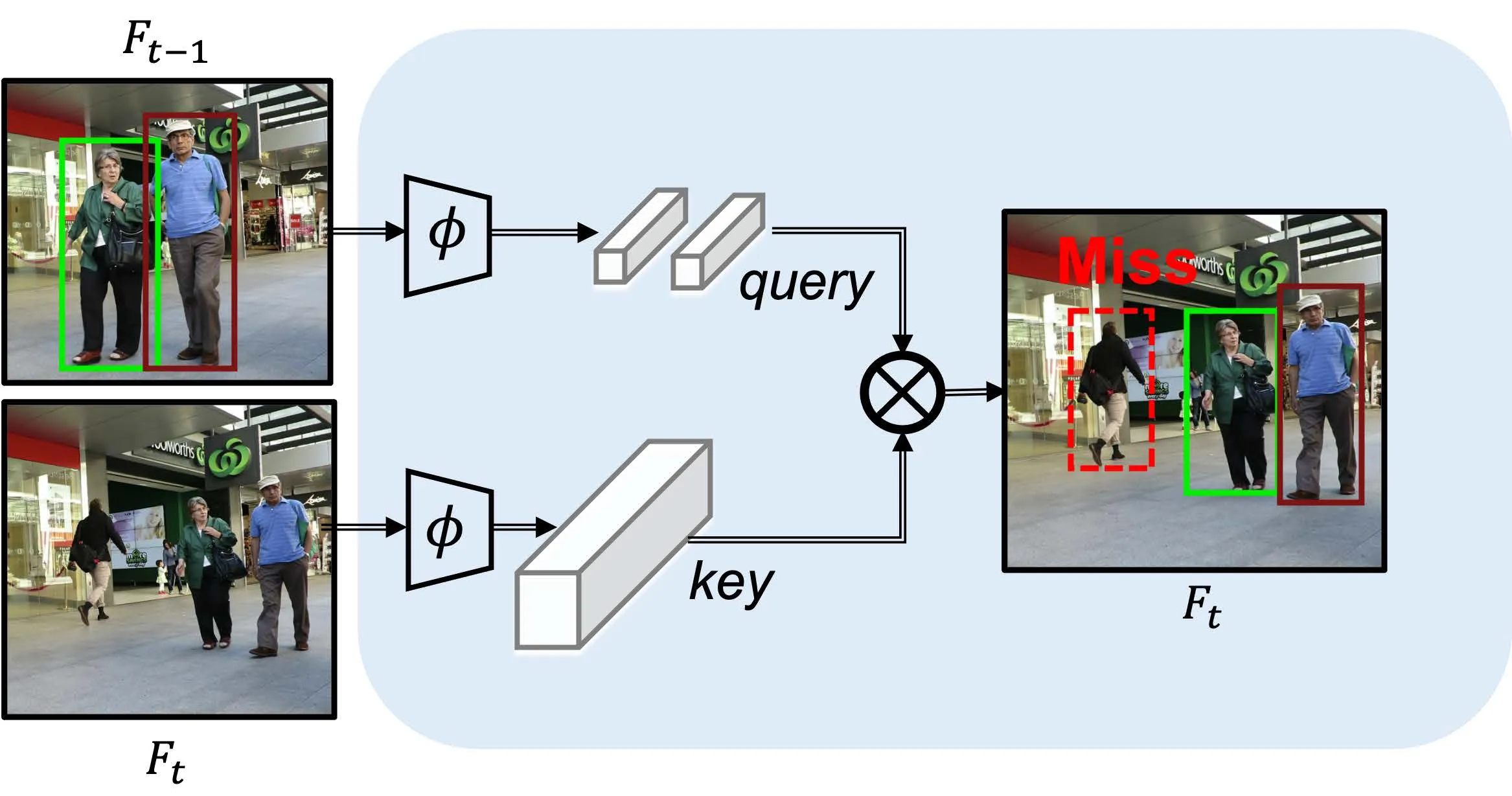
在单目标跟踪领域,注意力机制将上一帧的目标作为Query,下一帧作为Value,很容易就能实现对于单目标的跟踪。 但是对于多目标,这样的方法无法处理新生的目标,存在局限性。需要设计额外的流程来处理新生的轨迹。
主要流程#
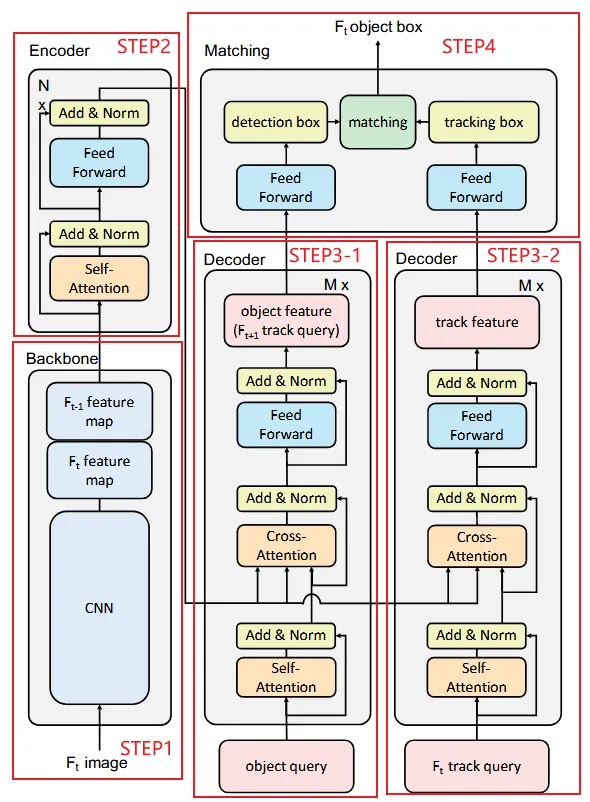
- 通过一个 CNN 网络 (ResNet50) 提取图像特征,特别的,将每个时刻特征保存到下一时刻;
- 再将 两个 连续帧的特征通过编码器 (自注意力机制) 得到 组合特征 ;
- 将组合特征作为 Key 输入到解码器中,将 对象查询 和上一帧的对象特征作为 轨迹查询 作为 Query 并行 输入到两个解码器中,分别得到检测特征和跟踪特征;
- 再通过并行的全连接层得到检测框和跟踪框,使用匈牙利算法进行IoU匹配得到最后的预测框。
TrackFormer#
主要流程#
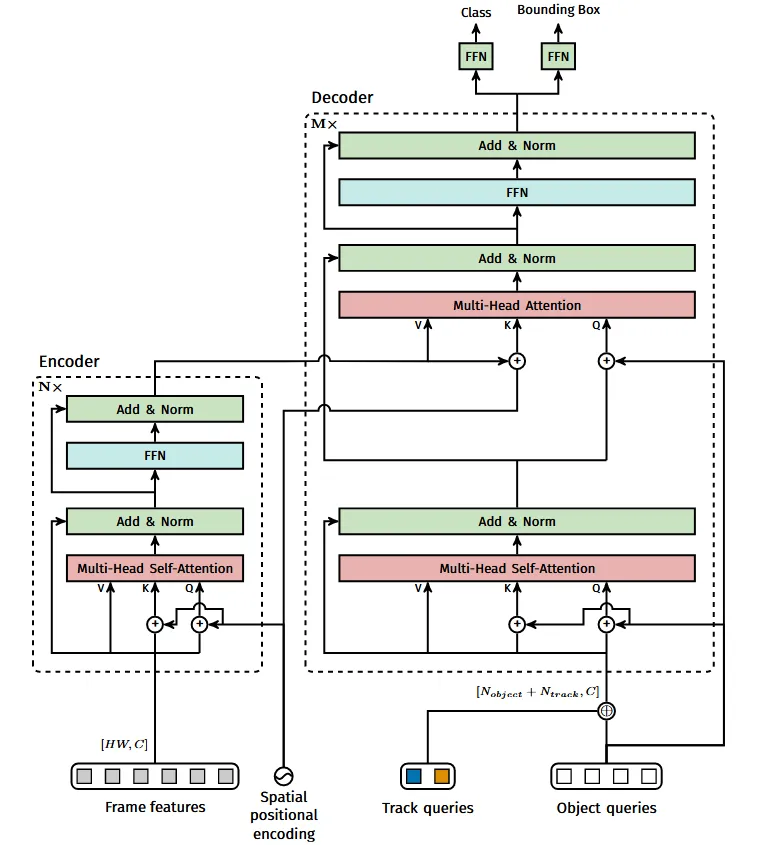
- 通过一个 CNN 网络 (ResNet50) 提取图像特征,并将特征通过编码器进一步 全局特征 信息;
- 将全局特征作为 Key 和 Value ,(上一帧得到的) 轨迹查询 与 对象查询 拼接后作为 Query 将输入到解码器中;
- 解码器的输出作为下一帧的 轨迹查询 ,同时通过全连接层得到预测框和类别预测。
- 解码器自注意力无法解决预测框重叠问题,因此需要通过删除低置信度框和 NMS 来解决强烈重叠的预测框。
MORT#
在 DETR 的基础上设计,与同期的 TransTrack 和 TrackFormer 相比,无需非极大值抑制和IoU匹配的后处理。
轨迹块感知标签分配 (TALA)#
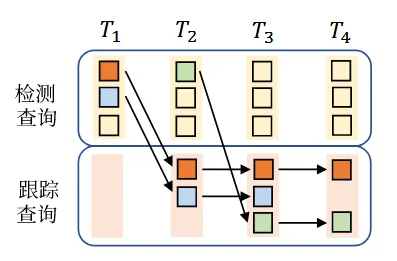
在 DETR 中,使用的是固定长度的对象查询,检测可以分配给任意对象。
而 MOTR 中引入了轨迹块感知标签分配 (TALA) 使检测查询仅用于检测新生成的对象,跟踪查询预测跟踪对象,如下图所示。
查询交互模块 (QIM)#
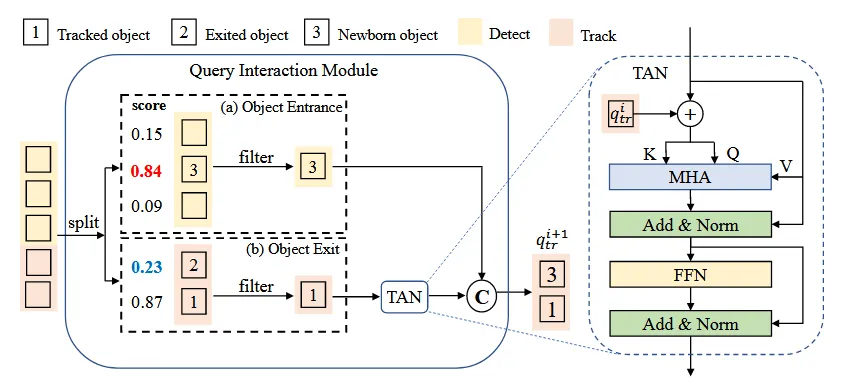 QIM 的输入是 Transformer 解码器产生的隐藏状态和对应的预测分数。在训练过程中,对于跟踪查询得到的对象,如果匹配的对象在真实值中消失或预测边界框与目标之间的交并比(IoU)低于0.5的阈值,则移除已终止对象的隐藏状态;对于对象查询的到的对象,只保留得分高于入门阈值的结果。
QIM 的输入是 Transformer 解码器产生的隐藏状态和对应的预测分数。在训练过程中,对于跟踪查询得到的对象,如果匹配的对象在真实值中消失或预测边界框与目标之间的交并比(IoU)低于0.5的阈值,则移除已终止对象的隐藏状态;对于对象查询的到的对象,只保留得分高于入门阈值的结果。
特别的,过滤后的对于跟踪查询得到的对象,通过时间聚合网络(TAN)后,与新生对象连接。
主要流程#
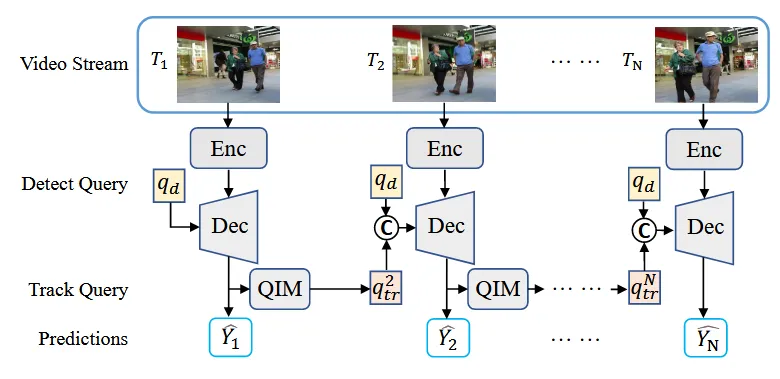
- 通过一个 CNN 网络 (ResNet50) 提取图像特征,并将特征通过编码器得到 全局特征 信息;
- 将全局特征作为 Key 和 Value ,检测查询和跟踪查询连接起来作为 Query 输入到解码器,生成 隐藏状态;
- 隐状态通过 全连接层 得到当前时刻的跟踪结果,同时通过 查询交互模块 (QIM) 得到下一帧的轨迹查询。